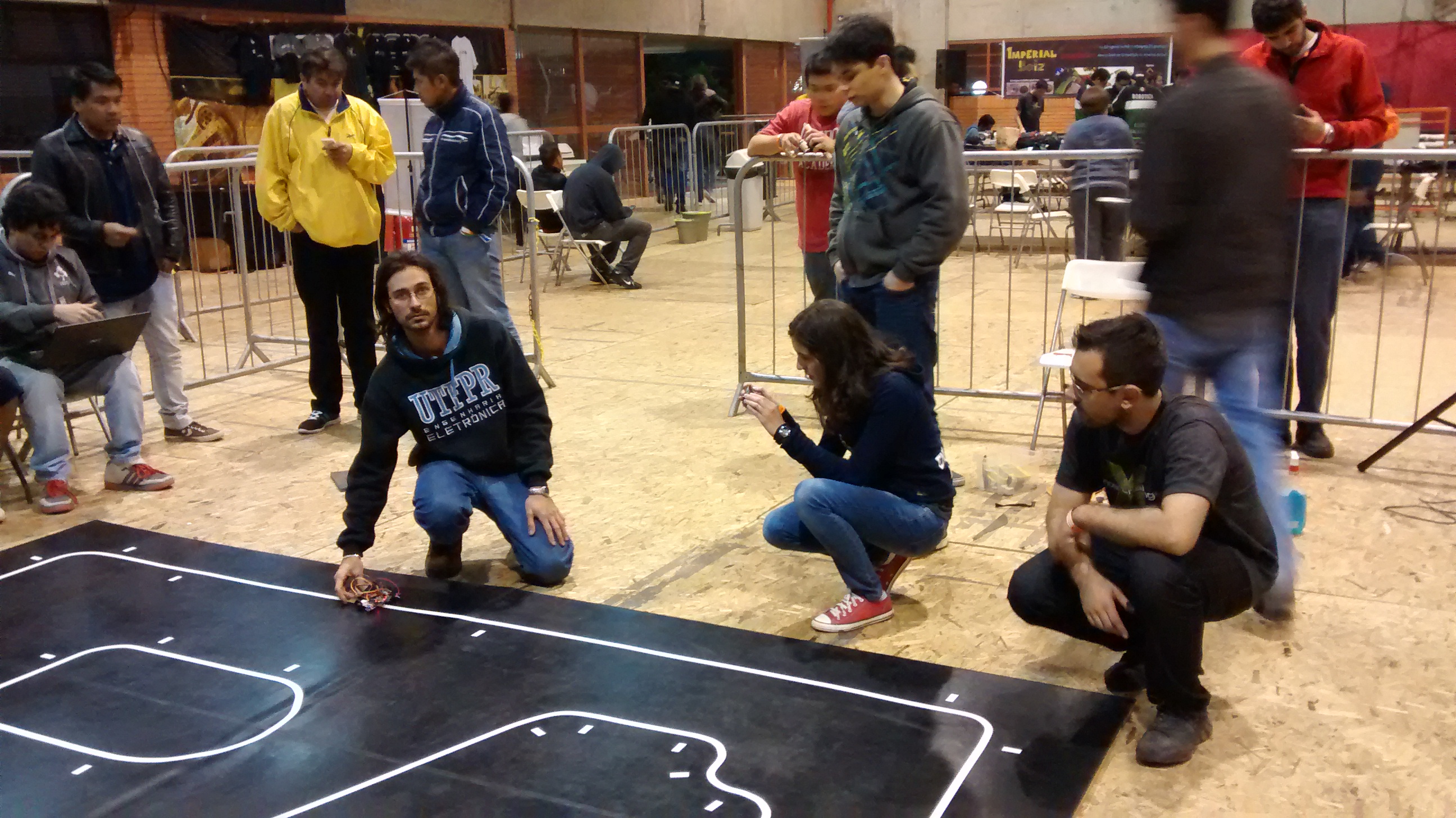
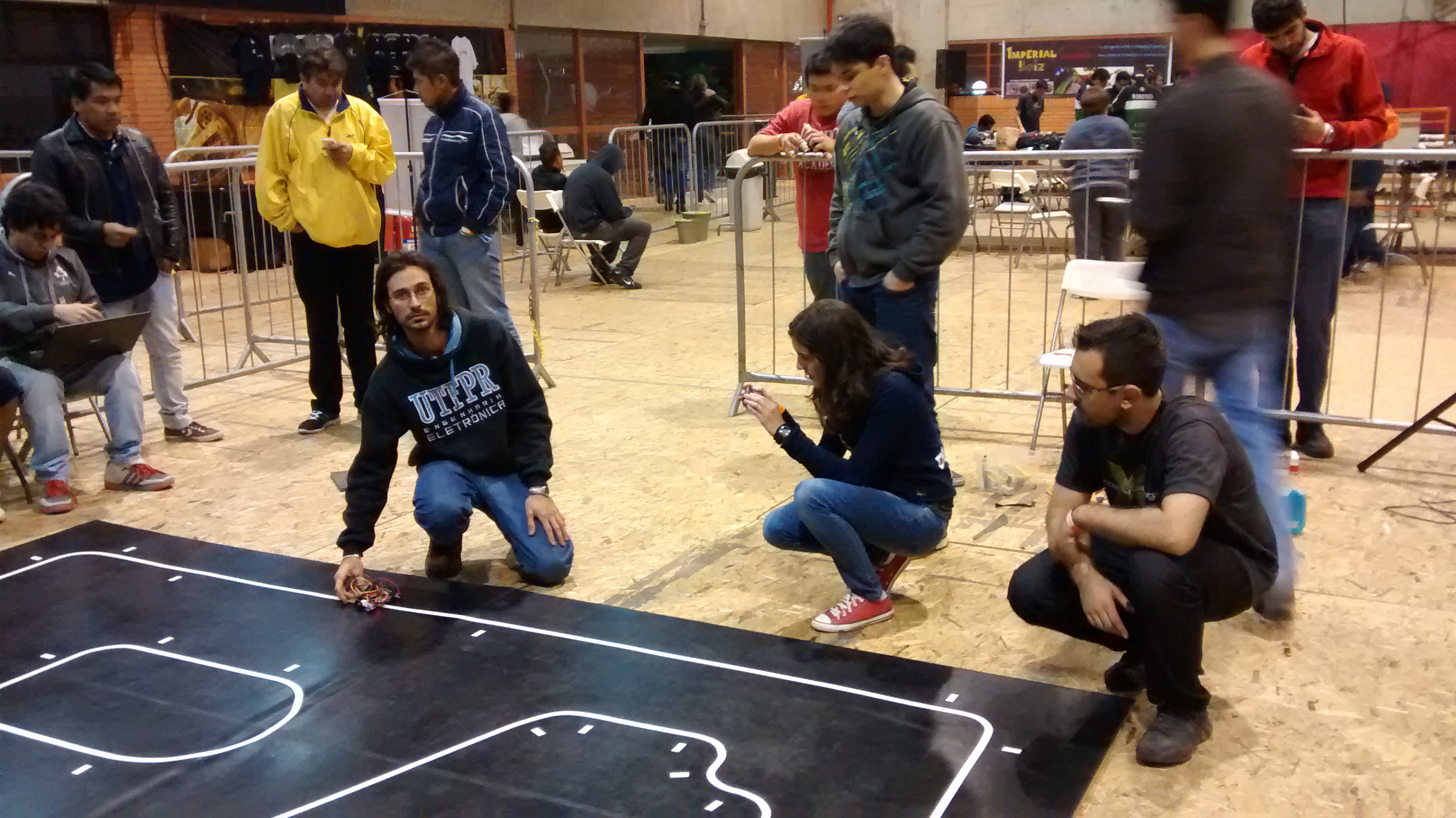
O robô seguidor de linha Vulture destacou-se na 10ª edição da Winter Challenge (2014) por seu desempenho competitivo, que, em relação ao ano anterior, obteve uma melhora de 80%, executando o trajeto de 19m em menos de 30s.
O "Projeto Seguidor de Linha" trata-se de elaborar e executar um projeto de robôs para competição cujo objetivo é percorrer um circuito pré-estabelecido que percorram o circuito sem desviar-se do mesmo e no menor tempo possível.
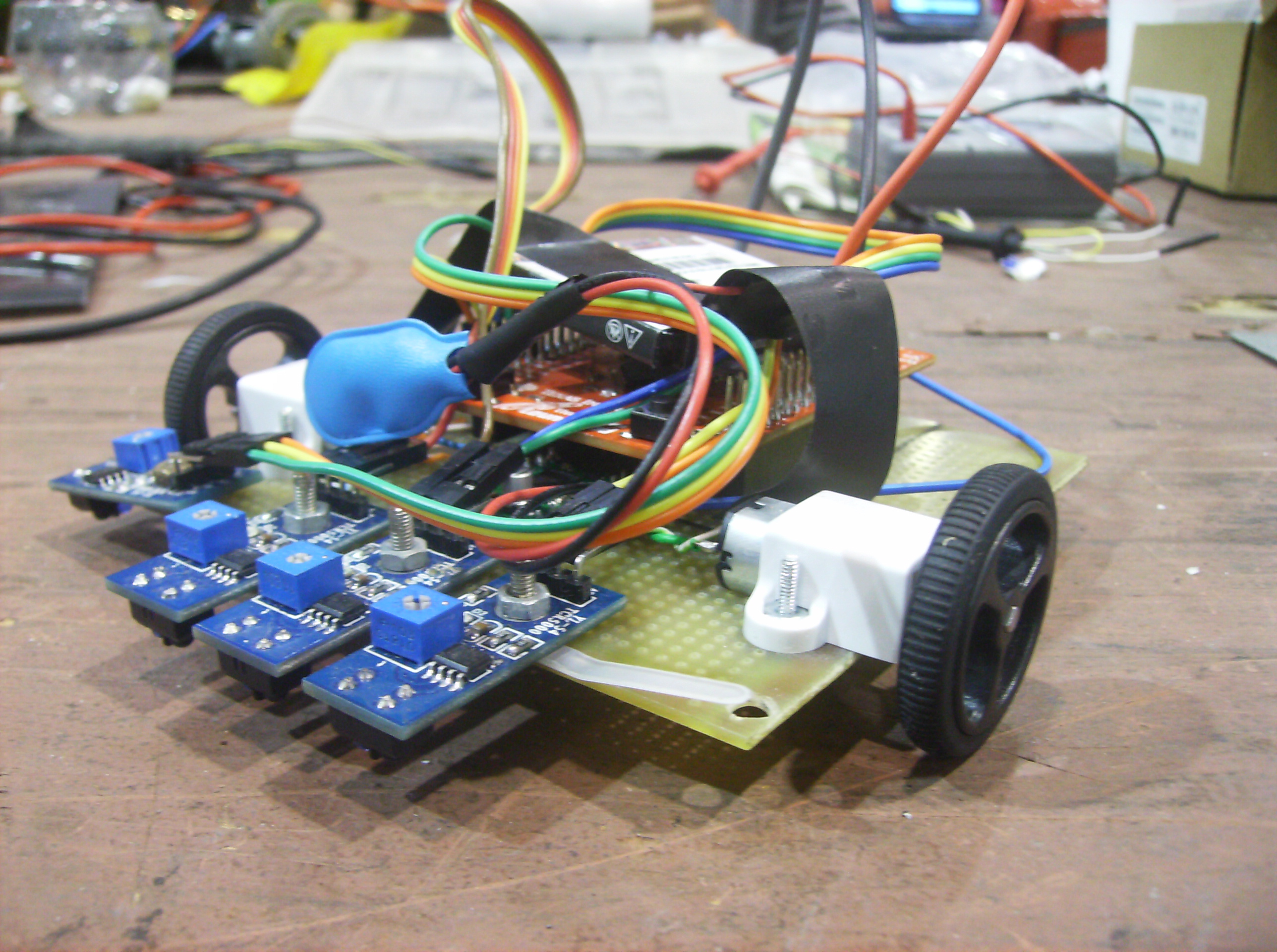
Um robô seguidor de linha consiste em um robô autônomo constituído de uma placa de controle, sensores infravermelho para detectar o trajeto a ser percorrido, motores em miniatura, circuitos de potência, baterias, rodas e a estrutura onde são fixados todos os componentes.
Apesar de ser um projeto simples devido à pouca quantidade de itens essenciais para a construção do mesmo, a otimização do seguidor de linha é um trabalho
minucioso que exige muito conhecimento em física, cálculo e programação.
Construir um robô inteligente, com aproveitamento na pista suficiente para obter um desempenho competitivo exige diversos testes e trabalho árduo.
Por tratar-se de um robô de corrida, toda ideia que permita ao seguidor ir mais rápido é bem vinda!









Gostaríamos de agradecer a todos que acompanharam o nosso trabalho... Leia mais »

A Crossbots participou em São Paulo no dia 8 de Outubro da Freescale Cup... Leia mais »
A Crossbots participou de umas das maiores competições de robótica... Leia mais »